Вадим писал(а):
Дабы не читать все 50 страниц форума, может ли кто охарактеризовать что тут случилось и чем всё закончилось?
Вы все спрашиваете одно и то же. Поднимите глаза чуть вверх, вдруг кто-то уже интересовался, чем все кончилось.
Сорян конечно, но 50 страниц читать довольно долго, хотя потихоньку постараюсь. Кто-нибудь может более-менее вкратце описать официальные повороты событий и что как?
Valken, Шаман уже все сказал, но вот тут чуточку более подробно:
http://www.skyriver.ru/forum/viewtopic. ... bf#p415998--------------------------------
Ну и накидать ссылочек на перспективные фанатские проэкты?
Смотри тему
"Пора делать Механоидов самим!", она специально вынесена в объявления в этом же разделе.
Ясно, я так и думал но вдруг где-то по середине свершилось какое-то чудо :D
Шаман писал(а):
Максимум реализма? Окей, тогда передвижение глайдера по оси Y не будет, поворот по (Z)Yaw будет очень медленным, потому что у глайдера только один толкающий движок, кстати поворот по (Y)Pitch тоже по идее должен отсутствовать.
В итоге получатся аля танки, только с танком Маус тяжелые и неповоротливые.
Ну так модели старые не годны для реализма, всё заново делать придётся, разрабатывать модели с инженерной задумкой в затылке, чтоб центр тяжести ниже центра опоры был при допустимых кренах, шоп куча эффекторов во все стороны торчало для маневрирования и т.д. С той арт-бессмыслицей что в М1-М2 было только продолжение делать можно.
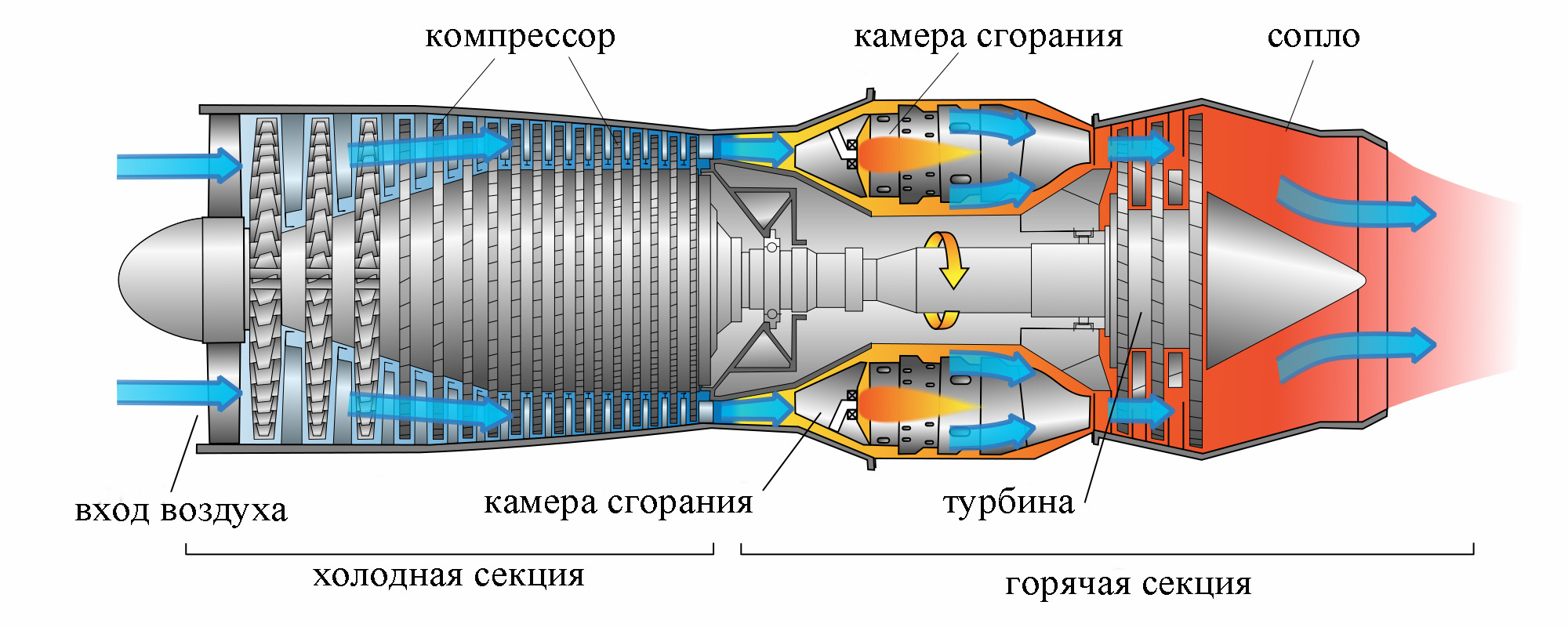
А кстати сделать реалистичные движки не так уж и сложно. В ролике ко вторым мехам частично показали как они работают.
Главные сопла оснащены затворками для изменения вектора тяги и её мощности. А дальше - всё можно завязать на главных движках без никаких дополнительных мини-моторов и прочего.
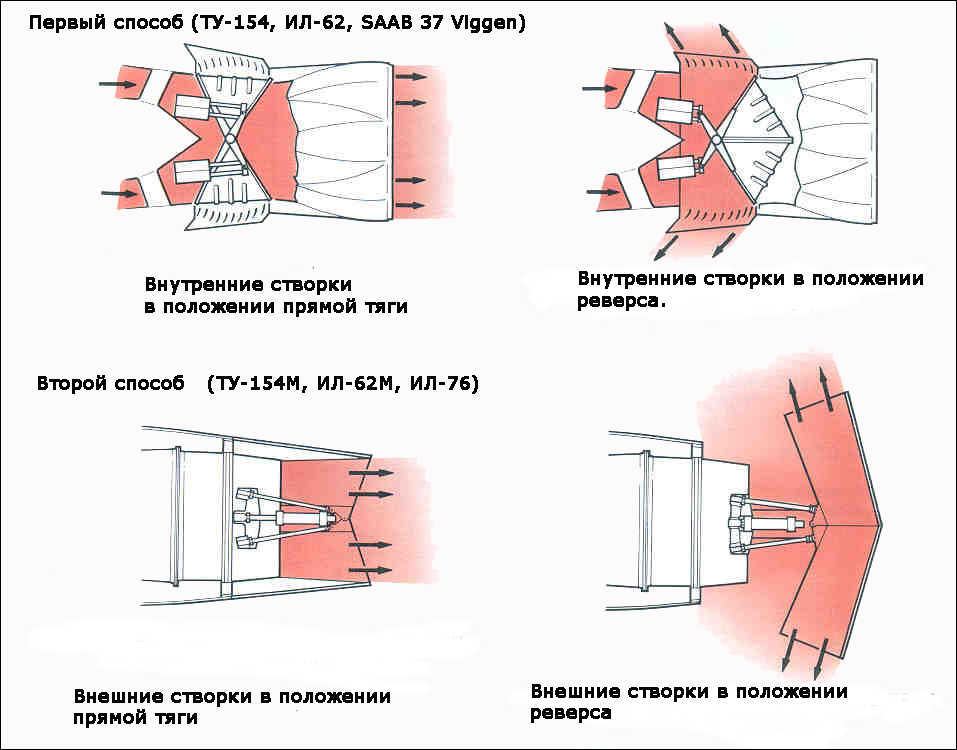 http://avia-simply.ru/esche-raz-o-reverse-tjagi/
http://avia-simply.ru/esche-raz-o-reverse-tjagi/ или же
https://dxdt.ru/2008/03/09/1203/, две или одна цельная пластина на конце движка либо же направленные вперёд отверстия по бокам и клапан для перекрытия сопла - и у нас есть реверсионная тяга. С помощью реверса легко повернуться на глайдерах с разнесёнными движками, что делает их манёвреннее (к примеру тот же Сокрушитель или Феникс). Просто ставим один двигатель в положение вперёд, а второй - в реверс. Глайдеры с спаянным движком будут полагаться на альтернативную систему, которая впрочем есть на всех глайдерах - развод тяги от главных движков на вторичные форсунки. При чём сами форсунки вполне даже можно сделать как статичными (просто дырка в корпусе для выхлопа), так и поворачивающимися в зависимости от глайдера и движка. Вещь вполне легко реализуемая, вон к примеру всем известный из Grand Theft Auto: San Andreas AV-8B II "Harrier" и пара других аппаратов вертикального взлёта.

Тяга передаётся по кожуху с движка на нос глайдера, там развести по форсунке справа, слева, снизу и сверху. Такие же можно приштопать и на сами движки, либо же использовать уже существущий реверс (если он встроен а не вынесен как пластина) и "рулить" путём частичного или полного закрытия клапана главного сопла и открытия клапана реверсионных форсунок. Если мы смогли таким методом поднять в воздух истребитель, то думаю заставить поворачивать почти что невесомый глайдер уж точно сможем :)
Соответственно когда происходит смещение вбок, тяга главного движка падает, при чём коэффициент передачи тягового усилия не 100%, а следовательно суммарная скорость движения по диагонале будет меньше скорости движения по прямой. На глайдерах с совмещённым двигателем вместо поворота реверсом можно установить более мощные форсунки, движка то всё равно два хоть выхлоп и один. Ну и в такой системе можно поэксперементировать с разными коэффициентами глайдеров и типов движков, мол на сколько включение реверса для разворота будет гасить скорость глайдера (может использовать этот манёвр как подобие ручного тормоза с разворотом чуть ли не на месте, только тогда как модуль с включением и выключением по кнопке), какие глайдера как будут себя вести базируясь на расположении и форме движков, а так же типу и размеру форсунок и т.д. Так же эта система позволяет наконец то сделать правдоподобную систему улучшений движка. Низкоуровневые пакеты будут просто менять параметры и мелкие детали в двигателях, к примеру уменьшить размер клапанов форсунок для увеличения тяги главного движка в ущерб манёвренности, или наоборот, в то время как более совершенные улучшения будут увеличивать тягу самого движка, а следовательно и скорость, и манёвренность.
В общем идея я надеюсь понятна? Всё, что нужно - это реверс с помощью изменяемого вектора тяги и по 2 форсунки с каждой стороны - одна на носу а вторая в корме на самих движках (может быть частью механизма реверса), и сделать чтобы они толкали в разные стороны для поворотов по осям (кроме горизонтального где к тому же ещё и реверс работает), и в одну сторону для стрейфа. Вроде как не особо сложно и в тоже время вполне таки Sci-Fi и реализм.